Overivew
本文将介绍Guided Policy Search(GPS)这种Model-Based的强化学习算法,并会按以下方式展开:
- Motivation:介绍GPS这种方法的特点;
- Problem formulation:介绍GPS所解决问题的具体形式;
- Framework:介绍GPS的整体框架;
- Deterministic policy case:从相对简单的deterministic policy case开始介绍GPS的具体流程;
- Stochastic policy case:从deterministic policy case过渡到stochastic policy case,介绍完整的GPS算法。
Motivation
下面通过将GPS跟不同类型的算法进行比较来说明GPS的特点。
- 与Model-Free算法相比:由于GPS对环境建立了模型(i.e., model/dynamics),在计算q value时,不仅仅是“记录”,还能进行“推算”,因此sample efficiency会比较高,收敛速度会比较快;
- 与其他Model-Based算法相比:在test的时候,部分Model-Based算法需要进行online optimization(i.e., 根据当前拟合的模型,使用某种优化算法,得到当前的action);而由于GPS最终得到的是一个parametric policy(e.g., 神经网络),因此在test的时候会比较快(无需做online optimization,只需要做一次forward pass);
- 与简单的Imitation Learning算法相比:在简单的IL中,teacher单方面地给student传授知识(i.e., supervised learning),而不管student的学习能力如何;而在GPS中,除了teacher给student传授知识以外,student还会给teacher反馈,要求teacher适配student的学习能力,形成闭环,因此train的效果会更好。
Problem Formulation
下面对我们所讨论的问题做一个界定。
- setting
- fixed time length task(e.g, 完成任务的时长限定在20s内,决策的频率是20Hz,则总步长$T$为400)
- assumption
- deterministic dynamics:$x_t = f(x_{t-1}, u_{t-1})$
- input
- environment
- immediate cost(reward) function:$c(x_t, u_t)$
- output
- parametric policy
- deterministic case:$u_t = \pi_\theta(x_t)$
- stochastic case:$\pi_\theta(u_t \vert x_t) \sim \mathcal{N}(\mu_t, \Sigma_t)$
- parametric policy
Framework
下面介绍GPS的整体框架。
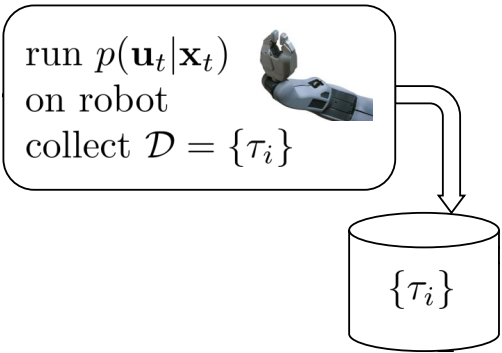
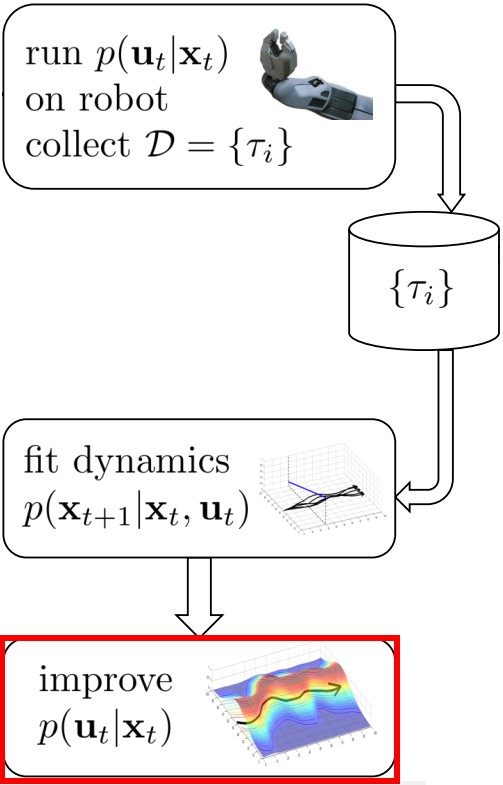
- collect data:通过controller与environment进行交互,收集数据;
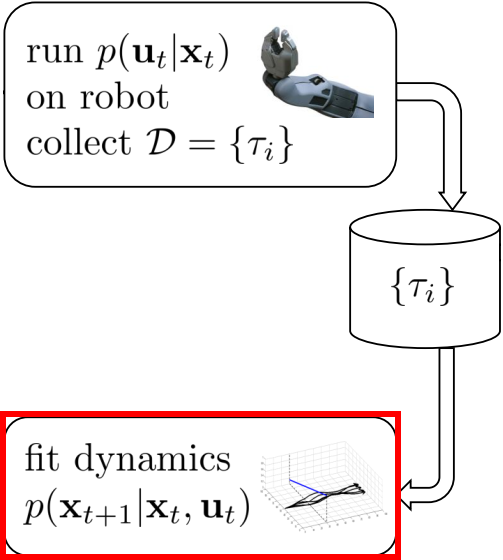
- fit dynamics:根据第一步收集到的数据,拟合dynamics;
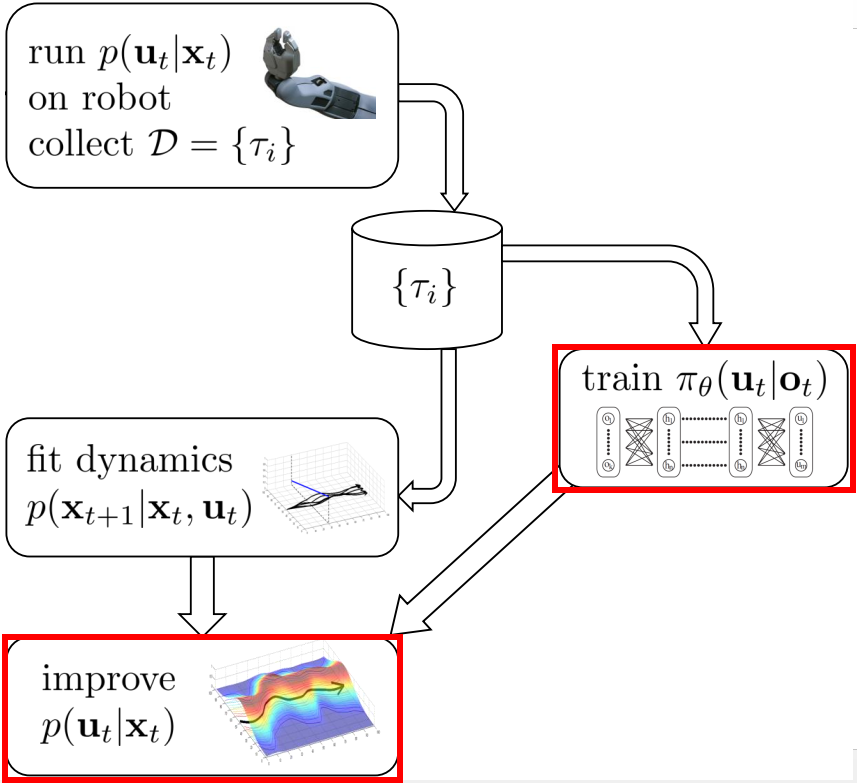
- optimization:优化controller(最优控制器)与policy(最终输出的parametric policy);
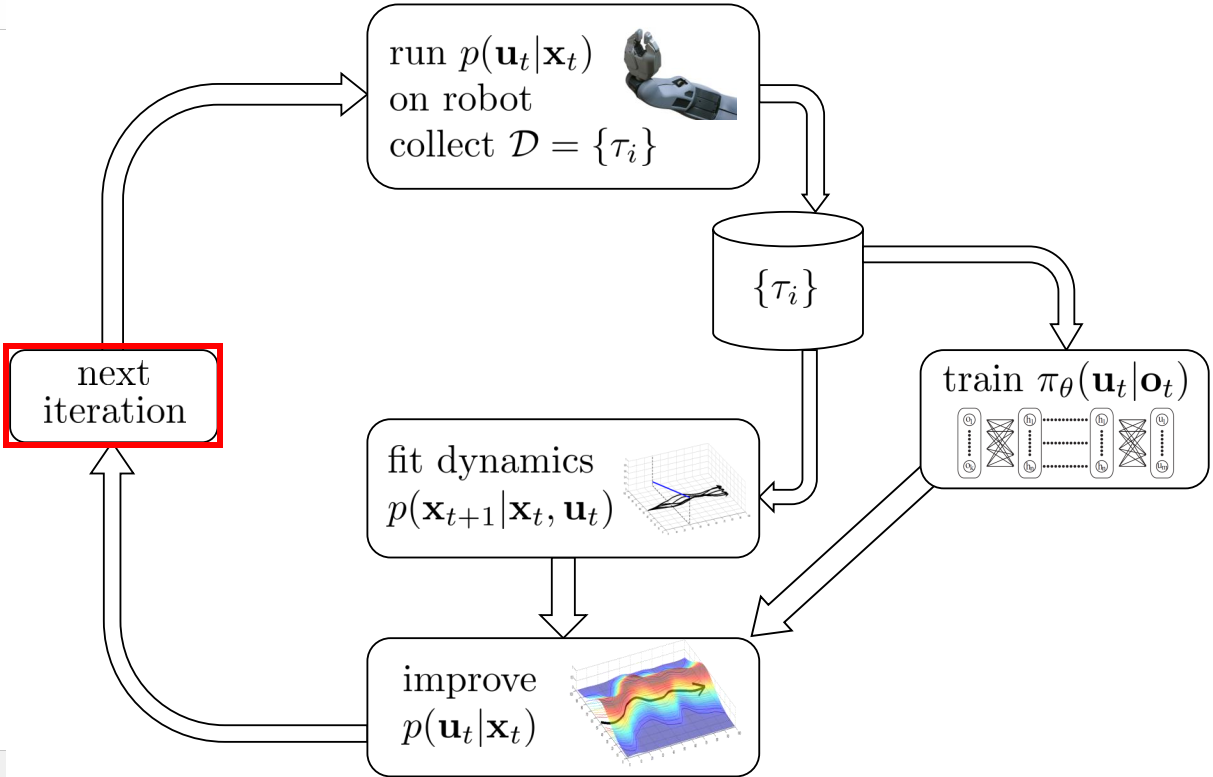
- next iteration:迭代。
Deterministic policy case
下面开始介绍Deterministic policy case下GPS的具体流程。
Collect data
使用controller与environment进行交互,得到轨迹数据集$\mathcal{D} = { \tau_i }$,其中轨迹$\tau_i = { x_{1i}, u_{1i}, \dots , x_{1T}, u_{1T} }$。
Fit dynamics
使用第一步得到的轨迹数据集来拟合一个time-varying linear model:$x_{t+1} = f(x_t, u_t) = A_tx_t + B_tu_t + c_t$,也就是说这个model对于不同时刻$t$的input会使用不同的linear model。
具体的拟合方法是使用同一时刻$t$,不同轨迹$\tau_i$的数据${ (x_{t1}, u_{t1}, x_{t+1,1}), \dots , (x_{ti}, u_{ti}, x_{t+1,i}) }$来做linear regression。
Optimization
Controller
- big picture
- optimization problem
- 我们想要在满足dynamics约束的条件下,最小化总cost,因此对应的轨迹优化问题为:
$$
\begin{aligned}
\mathop{\text{min }}_{x_1, u_1, \dots, x_T, u_T} &\sum_{t=1}^T c(x_t, u_t) \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$
- 我们想要在满足dynamics约束的条件下,最小化总cost,因此对应的轨迹优化问题为:
- solution
- 假如上述轨迹优化问题中$f(x_t, u_t) = F_t \begin{bmatrix} x_t \\\ u_t \end{bmatrix} + f_t$, $c(x_t, u_t) = \frac{1}{2} \begin{bmatrix} x_t \\\ u_t \end{bmatrix}^T C_t \begin{bmatrix} x_t \\\ u_t \end{bmatrix} + \begin{bmatrix} x_t \\\ u_t \end{bmatrix}^T c_t$,则有一个叫做Linear Quadratic Regulator(LQR)的优化方法可以对该轨迹优化问题进行求解。
- LQR基本原理如下:
- input:
- linear model($F_t, f_t$)
- quadratic cost($C_t, c_t$)
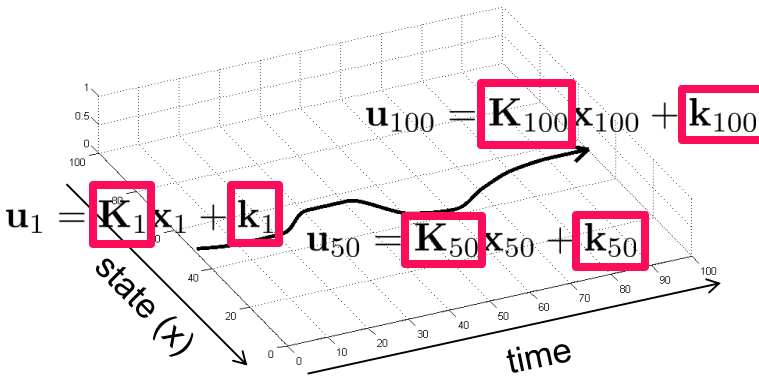
- output:$K_t, k_t$
- optimal control(上述轨迹优化问题的解):$u_t=K_tx_t+k_t$,$x_{t+1}=f(x_t, u_t)$
- input:
- 由于我们在fit dynamics中拟合的就是一个linear model,因此只要我们设置的cost function是quadratic的话就可以使用LQR来求解。
- 即使我们的cost function不是quadratic,也还可以使用iterative LQR(iLQR)来进行求解。iLQR可以求解nonlinear dynamics,nonquadratic cost下的轨迹优化问题,它的核心思想是对dynamics和cost分别进行linear及quadratic展开,然后用LQR进行求解。
Policy
- big picture
- optimization problem
- 因为GPS最后想要的是一个policy,因此在上述轨迹优化问题的基础上,加上一个优化变量$\theta$以及约束条件$u_t = \pi_\theta(x_t)$,来表示我们希望policy能够“学习”optimal control:
$$
\begin{aligned}
\mathop{\text{min }}_{x_1, u_1, \dots, x_T, u_T, \theta} &\sum_{t=1}^T c(x_t, u_t) \\
\text{s.t. } &u_t = \pi_\theta(x_t) \quad t=1, \dots, T\\
&x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$
- 因为GPS最后想要的是一个policy,因此在上述轨迹优化问题的基础上,加上一个优化变量$\theta$以及约束条件$u_t = \pi_\theta(x_t)$,来表示我们希望policy能够“学习”optimal control:
- solution
- 求解上述优化问题用到了一种叫做Dual Gradient Descent(DGD)的优化方法。DGD是一种求解形如以下优化问题的方法:
$$
\begin{aligned}
\mathop{\text{min }}_x &f(x) \\
\text{s.t. } & C(x)=0.
\end{aligned}
$$其具体求解过程为:- 写出对应的Lagrangian函数:$\mathcal{L}(x, \lambda) = f(x) + \lambda C(x)$;
- 求解最小化Lagrangian函数的$x$:$x^* = \mathop{\text{argmin }}_x \mathcal{L}(x, \lambda)$;
- 将$x^*$代入$\mathcal{L}(x, \lambda)$得到原问题的下界函数$g(\lambda) = \mathcal{L}(x^*, \lambda)$;
- 更新$\lambda$(类似对$\lambda$做gradient ascent):$\lambda = \lambda + \alpha \frac{\partial g}{\partial \lambda}$;
- 回到第二步,求新$\lambda$下对应的$x^*$,迭代。
- 接下来改变一下优化问题的表述方式,将dynamics约束单独提出来(之所以这么做,是为了将问题化归为会解的问题,下面会详细说),也就是说现在把问题理解为在满足dynamics约束下求解一个约束优化问题(i.e., 满足policy约束下最小化cost),而原来是满足dynamics和policy约束下求解一个无约束优化问题(i.e., 最小化cost):
$$
\begin{aligned}
\mathop{\text{min }}_{x_1, u_1, \dots, x_T, u_T, \theta} &\sum_{t=1}^T c(x_t, u_t) \\
\text{s.t. } &u_t = \pi_\theta(x_t) \quad t=1, \dots, T\\
\\
\text{s.t. } x_t = f&(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$ - 然后进行约束条件下的DGD(i.e., 整个DGD的过程都要满足约束):
- 仅将policy约束写进Lagrangian函数:
$$
\begin{aligned}
\mathcal{L}(\tau, \theta, \lambda)
&= \mathcal{L}(x_1, u_1, \dots, x_T, u_T, \theta, \lambda_1, \dots, \lambda_T) \\
&= \sum_{t=1}^T c(x_t, u_t) + \sum_{t=1}^T\lambda_t [u_t - \pi_\theta(x_t)] \\
&= \sum_{t=1}^T { c(x_t, u_t) + \lambda_t [u_t - \pi_\theta(x_t)] }.
\end{aligned}
$$ - 本来应该将$\begin{bmatrix}\tau \\\ \theta\end{bmatrix}$这一整个向量看作优化变量(对应DGD中的$x$),然后求解$\begin{bmatrix}\tau \\\ \theta\end{bmatrix}^*$(对应DGD中的$x^*$)。但这里假设$\tau$和$\theta$相互独立(为了能够求解),因此下面可以分别单独对$\tau$与$\theta$做优化,求得对应的$\tau^*$和$\theta^*$,然后用$\begin{bmatrix}\tau^* \\\ \theta^*\end{bmatrix}$来近似$\begin{bmatrix}\tau \\\ \theta\end{bmatrix}^*$。
- 求解$\tau^*$:对应的优化问题为:
$$
\begin{aligned}
\mathop{\text{min }}_\tau &\sum_{t=1}^T { c(x_t, u_t) + \lambda_t [u_t - \pi_\theta(x_t)] } \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$设$\tilde{c}(x_t, u_t)=c(x_t, u_t) + \lambda_t [u_t - \pi_\theta(x_t)]$,我们有:
$$
\begin{aligned}
\mathop{\text{min }}_\tau &\sum_{t=1}^T \tilde{c}(x_t, u_t)\\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$而这个形式的优化问题我们能够通过iLQR进行求解,因此能够求得$\tau^*$。 - 求解$\theta^*$:对应的优化问题为:
$$
\begin{aligned}
\mathop{\text{min }}_\theta &\sum_{t=1}^T { c(x_t, u_t) + \lambda_t [u_t - \pi_\theta(x_t)] } \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$由于优化变量是$\theta$,所以约束条件可以去掉,而且目标函数也可以简化,等价的优化问题为:
$$
\begin{aligned}
\mathop{\text{min }}_\theta &\sum_{t=1}^T \lambda_t [u_t - \pi_\theta(x_t)].
\end{aligned}
$$这是一个无约束优化问题(带权拟合问题),可以用诸如SGD等方法进行优化,因此也能够求得$\theta^*$。 - 将$\tau^*$和$\theta^*$代入Lagrangian函数,得到$g(\lambda) = \mathcal{L}(\tau^*, \theta^*, \lambda)$。
- 对$\lambda$做单步gradient ascent(跟求解$\theta^*$时一样,由于约束条件跟优化变量无关,所以等价于无约束优化),更新$\lambda$,迭代。
- 仅将policy约束写进Lagrangian函数:
- 求解上述优化问题用到了一种叫做Dual Gradient Descent(DGD)的优化方法。DGD是一种求解形如以下优化问题的方法:
Next iteration
回到第一步collect data,即用新的controller跟environment交互,迭代。
Summary
至此我们已经通过相对简单的deterministic policy case过了一遍GPS的整个流程,下面补充一些小小的细节:
- 为什么称之为GPS:guided主要体现在最后优化问题的约束$u_t = \pi_\theta(x_t)$,相当于有一个teacher(controller)在“指引”我们的policy。
- collect data使用controller还是policy:应该是使用controller,因为policy仅仅拟合了某些具体的$(x_t, u_t)$,而controller对各个$x_t$都是“最优”的。
- 为什么流程图中,train policy部分会跟$\tau_i$相关:这是因为在求解$\theta^*$时,$\tau^*$还没代入Lagrangian函数,也就是说Lagrangian函数中用的是$\tau$而不是$\tau^*$。
Stochastic policy case
deterministic controller对于一个起始点只能采集到一条轨迹,不利于拟合一个robust的dynamics,因此我们想要一个stochastic的controller。之后通过对stochastic controller进行supervised learning,我们最后会得到一个stochastic policy。
stochastic policy case跟deterministic policy case的唯一区别在于optimization这步(如红框所示),其他都是一样的。因此下面仅介绍stochastic policy case如何做optimization。
Using stochastic controller
首先介绍一个过渡性的内容,是关于使用stochastic controller的。
- 最直观的想法:把原来的约束问题(暂时先不考虑policy)改一下,将controller表示为$p(u_t \vert x_t) \sim \mathcal{N}(\mu_t, \Sigma_t)$,然后求解优化问题:
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\mathbb{E}_\tau[\sum_{t=1}^T c(x_t, u_t)] \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T,
\end{aligned}
$$其中$p = \mu_1, \Sigma_1, \dots, \mu_T, \Sigma_T$。但这样子是不work的,因为最后求出来的还是一个determinisitc controller(因为贪婪地采取最优策略效果是最好的)。 - 于是就强行把controller设成linear-gaussian的形式:
$$
p(u_t \vert x_t) = \mathcal{N}(K_t(x_t - \hat{x}_t) + k_t + \hat{u}_t, Q^{-1}_{u_t,u_t}),
$$其中,gaussian的均值为iLQR的解,方差为iLQR中的某个矩阵的逆,具体含义可以不用管,只需要知道这些东西都可以通过iLQR得到。 - 而该形式的controller恰好是以下优化问题的最优解:
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\sum_{t=1}^T\mathbb{E}_{p(x_t, u_t)}[ c(x_t, u_t) - \mathcal{H}(p(u_t \vert x_t))] \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$ - 这部分主要为下面做铺垫,核心在于我们现在知道了某种形式的优化问题的最优解。
Constrain controller in trust region
- motivation
- 在GPS中我们所fit的dynamics是local dynamics,也就是说它仅在当前controller“附近”是有效的;
- 在优化问题中,我们评价controller好坏会用到该local dynamics;
- 因此,为了确保评价的有效性,我们要限定controller在当前controller“附近”;
- 否则,即使contoller评价很高,也是虚假的/无效的/没有意义的。
- solution
- 将controller在当前controller“附近”用数学语言表述出来,即
$$
D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) \leq \epsilon,
$$其中$p(\tau)$表示轨迹$\tau$在新controller下发生的概率,$\bar{p}(\tau)$表示轨迹$\tau$在当前controller下发生的概率,$D_{KL}$表示KL-divergence,用于衡量两个分布的“相似程度”,KL-divergence越小,两个分布越相似。- 这个表示能够间接地限制controller和当前controller比较相似,因为$p(\tau) = p(x_1)\prod_{t=1}^{T-1} p(u_t \vert x_t)f(x_{t+1} \vert x_t, u_t)$,而对于新旧controller来说,$p(x_1)$以及$f(x_{t+1} \vert x_t, u_t)$都是一样的,因此区别仅仅在于$p(u_t \vert x_t)$。换句话说,$p(\tau)$和$\bar{p}(\tau)$的区别仅仅在于controller,因此控制$p(\tau)$和$\bar{p}(\tau)$的相似程度就可以间接地控制controller的相似程度。
- new optimization problem
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\mathbb{E}_\tau[\sum_{t=1}^T c(x_t, u_t)] \\
\text{s.t. } &D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) \leq \epsilon \\
&x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$ - 进行约束条件下的DGD(这里我不太懂为什么可以对不等式约束做DGD,逻辑上来讲对于不等式约束,需要限定$\lambda \geq 0$才能保证$g(\lambda)$是原问题的下界函数):
- 仅将$D_{KL}$约束写进Lagrangian函数:
$$
\begin{aligned}
\mathcal{L}(\tau, p, \lambda) &= \mathbb{E}_\tau[\sum_{t=1}^T c(x_t, u_t)] + \lambda (D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) - \epsilon) \\
&// D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) = \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)} [- \log \bar{p}(u_t \vert x_t) - \mathcal{H}(p(u_t \vert x_t))] \\
&= \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[c(x_t, u_t) - \lambda \log \bar{p}(u_t \vert x_t) - \lambda \mathcal{H}(p(u_t \vert x_t))] - \lambda \epsilon \\
&//提\lambda \\
&= \lambda \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[\frac{1}{\lambda} c(x_t, u_t) - \log \bar{p}(u_t \vert x_t) - \mathcal{H}(p(u_t \vert x_t))] - \epsilon
\end{aligned}
$$ - 求解$\begin{bmatrix} \tau \\\ p \end{bmatrix}^*$:对应的优化问题为:
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[\frac{1}{\lambda} c(x_t, u_t) - \log \bar{p}(u_t \vert x_t) - \mathcal{H}(p(u_t \vert x_t))] \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$假如我们设$\tilde{c}(x_t, u_t) = \frac{1}{\lambda} c(x_t, u_t) - \log \bar{p}(u_t \vert x_t)$,则该优化问题为:
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[\tilde{c}(x_t, u_t) - \mathcal{H}(p(u_t \vert x_t))] \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$而这个形式的优化问题我们知道其最优解的形式是什么(回忆Using stochastic controller部分),因此我们能够用iLQR求解$\begin{bmatrix} \tau \\\ p \end{bmatrix}^*$。 - 对$\lambda$做单步gradient ascent,迭代。
- 仅将$D_{KL}$约束写进Lagrangian函数:
- 将controller在当前controller“附近”用数学语言表述出来,即
Introduce stochastic policy
- statement
- 这部分由于没有细看论文,所以有些地方我也不是很清楚,只是介绍我自己的理解,希望谅解:)。
- motivation
- 我们想要得到的是一个parametric policy,因此采用跟deterministic policy case一样的思路,添加一个policy约束。
- solution
- optimization problem
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\mathbb{E}_\tau[\sum_{t=1}^T c(x_t, u_t)] \\
\text{s.t. } &p(u_t \vert x_t) = \pi_\theta(u_t \vert x_t) \quad t=1, \dots, T \\
&D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) \leq \epsilon \\
&x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$ - 进行约束条件下的DGD:
- 仅将policy约束和$D_{KL}$约束写进Lagrangian函数:
$$
\begin{aligned}
\mathcal{L}(\tau, p, \theta, \lambda, \eta) &= \mathbb{E}_\tau[\sum_{t=1}^T c(x_t, u_t)] + \sum_{t=1}^T \lambda_t [p(u_t \vert x_t) - \pi_\theta(u_t \vert x_t)] + \eta (D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) - \epsilon) \\
&// \sum_{t=1}^T \lambda_t [p(u_t \vert x_t) - \pi_\theta(u_t \vert x_t)] \overset{?}{\approx} \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[u_t^T\lambda_t + \rho_t D_{KL}(p(u_t \vert x_t) \Vert \pi_\theta(u_t \vert x_t))]\\
&\approx \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[c(x_t, u_t) + u_t^T\lambda_t + \rho_t D_{KL}(p(u_t \vert x_t) \Vert \pi_\theta(u_t \vert x_t))] + \eta (D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) - \epsilon) \\
&// \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[D_{KL}(p(u_t \vert x_t) \Vert \pi_\theta(u_t \vert x_t))] = \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[- \log \pi_\theta(u_t \vert x_t) - \mathcal{H}(p(u_t \vert x_t))] \\
&// D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) = \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)} [- \log \bar{p}(u_t \vert x_t) - \mathcal{H}(p(u_t \vert x_t))] \\
&= \sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[c(x_t, u_t) + u_t^T\lambda_t - \rho_t \log\pi_\theta(u_t \vert x_t) - \eta \log \bar{p}(u_t \vert x_t) - ( \rho_t + \eta) \mathcal{H}(p(u_t \vert x_t))] - \eta \epsilon
\end{aligned}
$$ - 求解$\begin{bmatrix} \tau \\\ p \end{bmatrix}^*$:对应的优化问题为:
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[c(x_t, u_t) + u_t^T\lambda_t - \rho_t \log\pi_\theta(u_t \vert x_t) - \eta \log \bar{p}(u_t \vert x_t) - ( \rho_t + \eta) \mathcal{H}(p(u_t \vert x_t))] \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$设$\tilde{c}(x_t, u_t) = c(x_t, u_t) + u_t^T\lambda_t - \rho_t \log\pi_\theta(u_t \vert x_t) - \eta \log \bar{p}(u_t \vert x_t)$,$\nu_t = \rho_t + \eta$,则上述优化问题可以表示为:
$$
\begin{aligned}
\mathop{\text{min }}_{\tau, p} &\sum_{t=1}^T \mathbb{E}_{p(x_t, u_t)}[\tilde{c}(x_t, u_t) - \nu_t \mathcal{H}(p(u_t \vert x_t))] \\
\text{s.t. } &x_t = f(x_{t-1}, u_{t-1}) \quad t=1, \dots, T.
\end{aligned}
$$而这个形式的优化问题我们知道最优解(回忆Using stochastic controller和Constrain controller in trust region部分),因此得到$\begin{bmatrix} \tau \\\ p \end{bmatrix}^*$。 - 求解$\theta^*$:跟deterministic policy case一样,由于约束条件跟待优化变量无关,所以实际上是一个无约束优化问题,不过问题是这里并没有用直接用上面的Lagrangian函数,我猜测问题是出在上面我没搞懂的带问号的约等于号那里,也许上面只是为了求解方便做了近似,因此在求解$\theta^*$时没有把Lagrangian函数展开到最后的形式,而是用了以下Lagrangian函数:
$$
\begin{aligned}
\mathcal{L}(\tau, p, \theta, \lambda, \eta) &= \mathbb{E}_\tau[\sum_{t=1}^T c(x_t, u_t)] + \sum_{t=1}^T \lambda_t [p(u_t \vert x_t) - \pi_\theta(u_t \vert x_t)] + \eta (D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) - \epsilon) \\
&// \sum_{t=1}^T \lambda_t [p(u_t \vert x_t) - \pi_\theta(u_t \vert x_t)] \overset{?}{=} \sum_{t=1}^T \mathbb{E}_{p(x_t)}[\mathbb{E}_{\pi_\theta(u_t \vert x_t)}[u_t]^T\lambda_t + \rho_t D_{KL}(p(u_t \vert x_t) \Vert \pi_\theta(u_t \vert x_t))]\\
&= \mathbb{E}_\tau[\sum_{t=1}^T c(x_t, u_t)] + \sum_{t=1}^T \mathbb{E}_{p(x_t)}[\mathbb{E}_{\pi_\theta(u_t \vert x_t)}[u_t]^T\lambda_t + \rho_t D_{KL}(p(u_t \vert x_t) \Vert \pi_\theta(u_t \vert x_t))] \\
&+ \eta (D_{KL}(p(\tau) \Vert \bar{p}(\tau) ) - \epsilon) \\
\end{aligned}.
$$因此,对应的关于$\theta$的无约束优化问题为:
$$
\mathop{\text{min }}_{\theta}\sum_{t=1}^T \mathbb{E}_{p(x_t)}[\mathbb{E}_{\pi_\theta(u_t \vert x_t)}[u_t]^T\lambda_t + \rho_t D_{KL}(p(u_t \vert x_t) \Vert \pi_\theta(u_t \vert x_t))].
$$应该可以使用诸如SGD等优化方法进行求解,于是我们得到$\theta^*$ - 对$\begin{bmatrix} \lambda \\\ \eta \end{bmatrix}$做单步gradient ascent,迭代。
- 仅将policy约束和$D_{KL}$约束写进Lagrangian函数:
- optimization problem
Conclusion
至此已经介绍完GPS的流程,这个算法给我印象最深刻的地方就是化归的思想,即将新构建的问题转化为之前已经知道解决方法的问题,令人叹为观止。